
4X4 o 4WD. Tracción en las cuatro ruedas. Tracción total. Sistemas de tiempo parcial o completo. La terminología puede ser confusa, especialmente cuando se agregan nombres específicos de las marcas como Quadra-Trac de Jeep, Quattro de Audi, 4Motion de VW y 4Matic de Mercedes Benz.
En general, el objetivo de todos los sistemas es proporcionar fuerza motriz (torque) a cada una de las cuatro ruedas para aumentar la tracción, pero no todas las configuraciones 4×4 son iguales.
Conozcamos los diferentes sistemas de transferencia de torque del motor a las llantas.
Un poco de historia
En los albores del automóvil, a finales del siglo XIX y principios del XX, todos los autos eran de tracción trasera (RWD) dado que era la forma más sencilla y eficiente de transmitir la potencia del motor a las ruedas. En esa época, los vehículos con tracción en las ruedas traseras ofrecían una distribución equilibrada del peso, favoreciendo el desempeño de autos con pretensiones deportivas así como en vehículos pesados.
El sistema funciona enviando la potencia del motor a través del eje de transmisión al diferencial, que luego la distribuye a las ruedas traseras. Esta configuración proporciona una sensación natural en el manejo y la aceleración, y a menudo da a los conductores una sensación de conexión con la carretera. Si bien la tracción trasera puede ofrecer una dinámica de manejo superior, tiene sus desventajas, como una menor tracción en superficies resbaladizas en comparación con sus contrapartes de tracción delantera, por ejemplo.
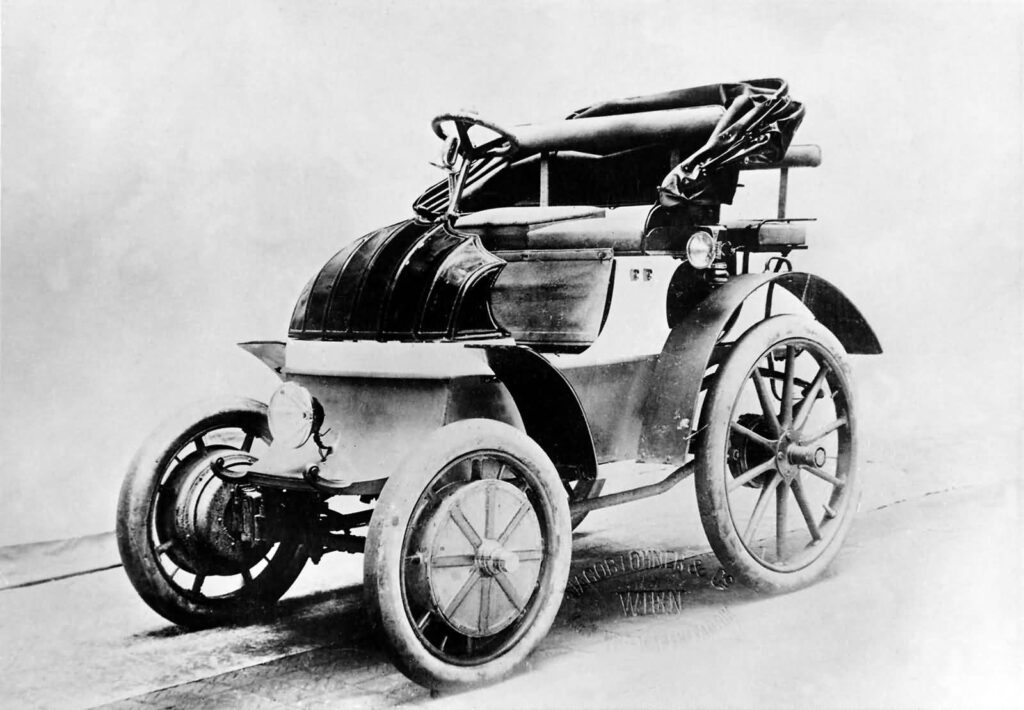
Así, buscando mejorar el desempeño, mediante el incremento en la tracción es que nace el primer vehículo con tracción en las cuatro ruedas. En Viena, Austria en 1899, Ferdinand Porsche diseño y construyo el Lohner-Porsche para Ludwig Lohner con un motor de combustión interna y tracción en las cuatro ruedas. Ese auto también fue el primer vehículo híbrido ya que contaba con cuatro motores eléctricos que impulsaban cada rueda, mientras que el motor de gasolina cumplía una función de generador. Este auto fue el equivalente actual a un vehículo eléctrico de rango extendido o EREV (Extened Range Electric Vehicle por sus siglas en ingles), en los cuáles el motor de combustión interna no está conectado de forma directa a las ruedas.
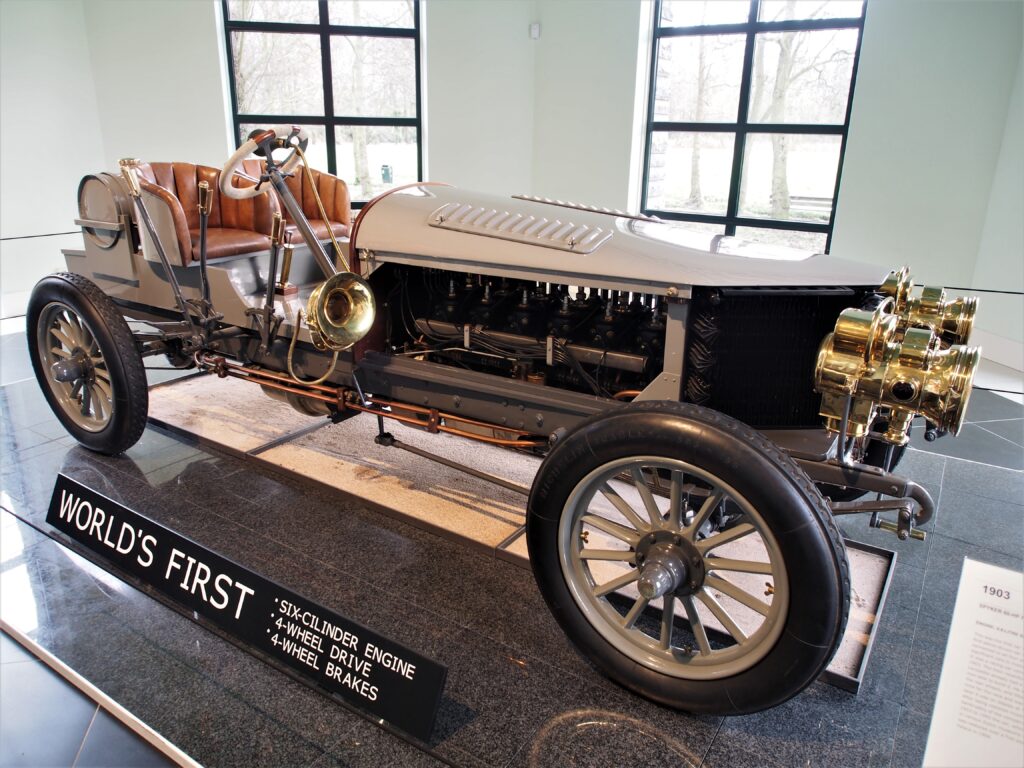
Por su parte, el primer auto con tracción mecánica en las cuatro ruedas y un motor de combustión interna fue el Spyker 60HP, desarrollado para la carrera París-Madrid acontecida en 1903 por los holandeses Jacobus y Hendrik-Jan Spijker.
Sin embargo, la historia la escriben los ganadores y el galardón del primer auto producido en serie con tracción en las cuatro ruedas se lo llevó el famoso Jeep CJ-2A de 1945. El nombre “CJ” significa Civilian Jeep.

En cuanto a vehículos ligeros de pasajeros, la tracción en las cuatro ruedas tardaría en ser adoptada. Fue hasta 1972 cuando Subaru presentó el modelo Leone, que se convertiría en el primer vehículo de pasajeros con tracción en las cuatro ruedas.

El Audi Quattro le siguió en 1980 y revolucionó los rallys; ningún vehículo con tracción en dos ruedas ha logrado ganar el Campeonato Mundial de Rally desde que el Quattro se convirtiera en el primer campeón de tracción en las cuatro ruedas en 1983.

Existen casi tantos tipos diferentes de sistemas de tracción en las cuatro ruedas como vehículos con tracción en las cuatro ruedas. Parece que cada fabricante tiene varios esquemas diferentes para proporcionar potencia a todas las ruedas. El lenguaje que utilizan los diferentes fabricantes de automóviles a veces puede ser un poco confuso, así que antes de comenzar a explicar cómo funcionan, aclaremos algunos términos:
Four Wheel Drive, 4X4 o tracción en las cuatro ruedas: por lo general, cuando los fabricantes dicen que un vehículo tiene tracción en las cuatro ruedas o 4×4, se refieren a un sistema de tiempo parcial. Estos sistemas están destinados solo para su uso en condiciones de baja tracción, como fuera de la carretera o sobre lodo o nieve.
All Wheel Drive, AWD o tracción en todas las ruedas: a estos sistemas a veces se los llama tracción en las cuatro ruedas permanente. Estos sistemas de tracción están diseñados para funcionar en todo tipo de superficies, tanto dentro como fuera de la carretera, y la mayoría de ellos no se pueden apagar.
Los sistemas All Wheel Drive pueden ser de tiempo parcial o permanente y ambos pueden ser evaluados con los mismos criterios; el mejor sistema enviará la cantidad correcta de torque a cada rueda, que es el torque máximo que no hará que la llanta patine.
Conceptos básicos
Antes de entrar al detalle, debemos entender los conceptos básicos sobre la tracción y conocer los componentes que conforman un sistema de tracción en las cuatro ruedas.
Necesitamos también saber un poco sobre torque, tracción y el deslizamiento de las ruedas para poder comprender los diferentes sistemas de tracción en las cuatro ruedas que encontramos en los autos.
Torque, Tracción y deslizamiento de las ruedas
El torque es la fuerza rotativa que produce el motor y es lo que mueve tu auto.
Los distintos engranes de la transmisión y el diferencial multiplican el torque y lo distribuyen a la(s) rueda(s). Más torque puede ser enviado a las ruedas en el primer cambio en comparación al quinto o sexto, porque el 1er cambio tiene una relación de transmisión mayor que permite multiplicar el torque generado por el motor.
Lo interesante del torque es que, en situaciones de baja tracción, la cantidad máxima de torque que se puede crear está determinada por la cantidad de tracción, no por el motor. Entonces, es igual de importante la tracción o adherencia al suelo que generen los neumáticos.
Si éstos no se adhieren al suelo, simplemente no hay forma de aprovechar el torque generado por el motor.
Hallazgo 1: Definimos la tracción como la cantidad máxima de fuerza que la llanta o neumático pueden aplicar contra la superficie.
Estos son los factores que afectan la tracción:
El peso sobre la llanta: cuanto más peso tenga una llanta, más tracción tendrá. El peso puede cambiar a medida que el vehículo se desplaza. Por ejemplo, cuando el auto gira en una curva, el peso se desplaza hacia las ruedas externas. Cuando acelera, el peso se desplaza hacia las ruedas traseras.
El coeficiente de fricción: este factor relaciona la cantidad de fuerza de fricción entre dos superficies (llanta y el suelo/terreno), con la fuerza que mantiene unidas las dos superficies (el peso sobre la llanta).
En nuestro caso, relaciona la cantidad de tracción entre las llantas y la superficie con el peso que descansa sobre cada llanta.
El coeficiente de fricción es principalmente una función del tipo de llanta del auto y del tipo de superficie sobre la que circula el vehículo.
Por ejemplo, una llanta de un auto F1 tiene un coeficiente de fricción muy alto cuando se conduce sobre una pista de concreto. Esa es una de las razones por las que los autos de carreras en general pueden tomar curvas a velocidades tan altas. El coeficiente de fricción de esa misma llanta en el lodo sería casi nulo.
Por el contrario, las llantas todoterreno con grandes gajos no tendrían un coeficiente de fricción tan alto en el pavimento seco, pero en el lodo, su coeficiente de fricción es extremadamente alto.
El beneficio de la tracción en las cuatro ruedas es fácil de entender: si conduces con cuatro ruedas en lugar de dos, tienes el potencial de multiplicar la cantidad de fuerza longitudinal (la fuerza que te hace avanzar) que las llantas aplican al suelo.
Sistemas de tracción en las cuatro ruedas Electrónicos Vs Mecánicos
Como hemos mencionado, no todos los sistemas de tracción en las cuatro ruedas son iguales.
Los sistemas de tracción total se pueden dividir en dos categorías: sistemas puramente mecánicos (por ejemplo, los del Ford Bronco o Jeep Wrangler) o sistemas controlados eléctricamente como los de un Mini AllRoad, Infiniti QX60 y Jetour T2.

Hoy en día, con el avance en la computación y el incremento de los sistemas electrónicos en los autos, cada vez es más común encontrar sistemas electrónicos de tracción en las cuatro ruedas o 4WD, en lugar de 4×4.
Básicamente, en lugar de un diferencial central se encuentra un clutch electrónico que acopla el eje delantero o trasero en función de una variedad de factores, como el deslizamiento de las ruedas, la velocidad del motor, el ángulo de dirección y otras variables. Algunos sistemas avanzados pueden variar la cantidad de torque que va a cada extremo del auto para conseguir la máxima tracción o estabilidad, mientras que otros permiten al conductor ajustar la distribución del torque desde el vehículo.
Siguiente capítulo: Componente de los sistemas de tracción 4×4
Manda tus comentarios o sugerencias a:
info@automobiliti.com
NEVER STOP DRIVING





0 comentarios